برای شناخت دقیق پمپ ها و کاربرد آنها در شرایط مناسب، آگاهی از اصطلاحات زیر ضروری است:
الف) توان الکتریکی
توان الکتریکی جذبی هر فاز در موتورهای آسنکرون قفس سنجابی سه فاز، از رابطه زیر به دست می آید:
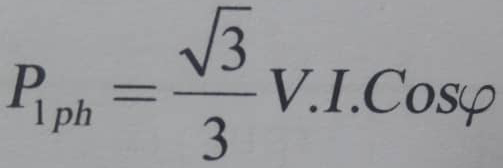
در این رابطه
V: ولتاژ هر فاز
I : آمپر هر فاز است.
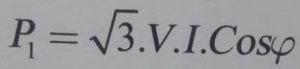
در صورتی که ولتاژ و آمپر جذبی فازهای دیگر، با هم برابر باشد، توان جذبی کل الکتروموتور، سه برابر رابطه بالا خواهد بود، یعنی:
توجه: اغلب به ندرت پیش می آید که ولتاژ و آمپر جذبی فازها با یکدیگر دقیقه برابر باشد. معمولا ولتاژ و آمپر فازها بین ۲ تا ۳ درصد با یکدیگر تفاوت دارند که در این حالت، توان جذبی کل الکتروموتور، از جمع جبری توان هر فاز به دست می آید.
موضوع مهمی که دارای اهمیت است، تفاوت بین توان جذبی الکتروموتور و توان نامی آن، یا به بیان دیگر، تفاوت آمپر جذبی الکتروموتور در نقطه کار و آمپر نامی آن می باشد. یک الکتروموتور، می تواند آمپر نامی ۶۰ آمپر داشته باشد اما در لحظه کار، آمپر جذبی ۴۵ آمپر. این بدین معنی است که الکتروموتور توانایی عبور ۶۰ آمپر را دارد اما در لحظه کار، ۴۵ آمپر از آن عبور می کند. باید توجه داشت که در صورتی که توان جذبی الکتروموتور در نقطه کاری تفاوت زیادی با توان نامی آن داشته باشد. بعضی از پارامترهای موتور، مانند بازده و ضریب قدرت، افت زیادی خواهند داشت. به عنوان مثال، تصور کنید که توان جذبی پمپی در نقطه کاری، ۱۵ کیلووات باشد و برای ضریب ایمنی بیشتر، الکتروموتور ۴۵ کیلووات انتخاب گردد. این انتخاب، باعث می شود که بازده الکتروموتور من از ۹۶ به ۹۲ درصد، و ضریب قدرت از ۹۲% به ۸۴% درصد کاهش یابد.
در واقع، انتخاب نادرست توان الکتروموتور، علاوه بر افزایش هزینه های اولیه مربوط به خرید الکترو موتور با توان بیشتر و همچنین خرید کابل و کلید و سایر تجهیزات الکتریکی متناسب با توان نامی موتور، باعث کاهش بازده و افزایش هزینه های جاری تأمین انرژی موتور در مدت کار کرد خواهد شد.
توان نامی الکتروموتور، توانی است که الکترو موتور برای کار کرد دائم و طولانی مدت قادر به تأمین آن باشد. در واقع توان نامی الکتروموتور، توانP2 است نه توان P1 یعنی توان نامی گزارش شده در کاتالوگ ها یا پلاک الکتروموتور، برابر با رابطه زیر می باشد:

بنابراین الکتروموتور از نظر طراحی، قابلیت جذب توان الکتریکی P1 را از شبکه دارد (این توان بیش از توان ۲P یا توان نامی است )و فقط پس از ضرب این توان در بازده الکترو موتور، می توان تشخیص داد که آیا الکتروموتور در توانی بیش از توان نامی کار می کند یا خیر، در صورتی که آمپر جذبی با آمپر نامی الکتروموتور مقایسه شود، نیازی به روابط بالا نبوده و سریعا با مقایسه آمپر جذبی و نامی، می توان اضافه بار الکتروموتور را تشخیص داد.
اگر تصور شود که ولتاژ شبکه ۴۰۰ ولت، و ضریب قدرت الکتروموتور و بازده ۸۵/۰ باشد، از رابطه بالا می توان به طور تقریبی، به رابطه زیر رسید:
یعنی آمپر نامی In تقریبا برابر است با ۲ برابر ثوان نامی الکترو موتور به کیلووات. با استفاده از رابطه بالا، می توان به طور تقریبی و حدودی، درباره اضافه بار داشتن الکتروموتور اظهار نظر نمود.
ب) جریان راه اندازی
الکتروموتورهای القایی آسنکرون قفس سنجابی با مولد برق متناوب، در هنگام راه اندازی از حالت سکون تا دور نامی)، به جریان راه اندازی بالایی نیاز دارند. معمولا جریان راه اندازی ماکزیمم، بین ۶ تا ۷ برابر جریان نامی الکتروموتور می باشد. در عمل جریان راه اندازی، بین ۶ تا ۷ برابر آمپر جذبی در نقطه کاری می باشد. یعنی اگر آمپر نامی الکتروموتور، ۶۷ آمپر باشد اما آمپر جذبی الکتروموتور در نقطه کاری (پس از رسیدن به دور و گشتاور نامی) ۴۵ آمپر، جریان راه اندازی تقریبا ۶ تا ۷ برابر ۴۵ آمپر میباشد. به همین دلیل، پمپ های سانتریفوژ را با شیر فلکه بسته راه اندازی می کنند. در واقع در نقطه شات اف، آمپر جذبی الکتروپمپ های سانتریفوژ مینیمم می باشد که در نتیجه، هنگام راه اندازی، آمپر کمتری از شبکه کشیده می شود.
نکته: پمپ های جریان محوری که منحنی Q- PBHP نزولی دارند، با شیر فلکه باز راه اندازی می شوند.
اقدام دیگری که می توان برای کاهش جریان راه اندازی انجام داد، استفاده از درایورهای دور متغیر است. با استفاده از این درایورها (مانند اینورتورها)، می توان راه اندازی نرم انجام داد و در مدت زمان طولانی تر، دور الکترو موتور را به دور نامی رساند این کار، باعث می شود که جریان راه اندازی ماکزیمم، ۲ تا ۳ برابر جریان نامی شود. البته اینورتورها مزایای بسیاری دارند؛ یکی از مزایای آنها، راه اندازی نرم و کاهش جریان راه اندازی الکتروموتور است.
- راه اندازی ستاره – مثلث
متداول ترین کار برای کاهش جریان راهاندازی، راه اندازی ستاره – مثلث موتور می باشد. راه اندازی ستاره – مثلث، امکان می دهد که هنگام راه اندازی، ولتاژ بیشتر و آمبر کمتری از شبکه کشیده شود. از رابطه توان P ملاحظه می شود که توان ورودی با حاصل ضرب ولناژ، در آمپر، رابطه مستقیم دارد. از آنجا که توان لازم برای راه اندازی الکتروموتور، مقداری ثابت می باشد، با افزایش ولتاژ، آمپر جذبی از شبکه کاهش می یابد و در واقع اساس راه اندازی ستاره . مثلث بر این موضوع استوار است.
راه اندازی ستاره – مثلت، فقط در موتور های سه فاز امکان پذیر میباشد. کلاف های سه فارم که در استاتور الکترو موتور با نظم خاصی پیچیده شده اند. شش سر خواهند داشت (هر فاز دو سر). در حالی که کابل های شبکه سه فاز ۳ عدد می باشد، بنابراین باید شش سر سیم بیرون آمده از الکتروموتور را طوری به یکدیگر، متصل نمود که تبدیل به سه سرسیم شود و آنها را به کابل های شبکه برق متصل کرد. شکل اتصال شش ترسیم بیرون آمده از الکتروموتور (جعبه ترمینال) به یکدیگر، می تواند به صورت ستاره با مثلث باشد.
موضوع مهمی که باید به آن توجه شود، طراحی ساختار داخلی الکتروموتور است. در اتصال ستاره، ولتاژ هر خط در موتور ۳ برابر اتصال مثلث خواهد شد. یعنی اگر ولتاژ شبکه ۴۰۰ ولت باشد، و موتور به گونه ای طراحی شده باشد که اختلاف پتانسیل (ولتاژ) هر خط در اتصال مثلث نیز ۴۰۰ ولت باشد، ولتاژ هر فاز در الکترو موتور (و همچنین شبکه) ۶۹۰ ولت می شود و آمپر جذبی برای راه اندازی نیز ۳ برابر کمتر خواهد شد. در این موتور، با اتصال مثلث، ولتاژ هر خط برابر با ۴۰۰ ولت می شود. اگر چه به صورت لحظه ای ولتاژ شبکه به ۶۹۰ ولت افزایش می یابد، اما کار کرد طولانی مدت در این ولتاژ امکان پذیر نخواهد بود. بنابراین برای راه اندازی ستاره به مثلسث، ابتدا با استفاده از کلیدهای ستاره . مثلث، نحوه اتصال سر سیم های موتور به صورت ستاره می شود تا آمپر جذبی کاهش و ولتاژ افزایش یابد، سپس در کسری از ثانیه، دوباره کلید عمل می کند و نحو سرسیم بندی موتوره به صورت مثلث شده و ولتاژ الکتروموتور، همان ولتاژ شبکه می گردد.
گشتاور راه اندازی الکتروموتور، با آمپر جذبی الکتروموتور ارتباط مستقیم دارد. در راه اندازی ستاره – مثلث، الکترو موتور با گشتاور کمتری نسبت به راه اندازی تک ضرب راه اندازی می گردد. در پمپ های سانتریفوژ، معمولا گشتاور راه اندازی، کوچک بوده و در صورتی که شیر فلکه خروجی پمپ بسته باشد، الکتروموتور فقط باید گشتاوری برای غلبه بر اینرسی سکون قطعات پمپ و موتور داشته باشد؛ اما در سایر تجهیزات و دستگاهها، موضوع گشتاور راه اندازی در راه اندازی ستاره – مثلث باید بررسی شود. در پمپ های سانتریفوژ نیز که با شیر فلکه باز راه اندازی می شوند و هذ استاتیکی سیستم بالا می باشد، موضوع گشتاور راه اندازی الکتروموتور، با اهمیت خواهد بود.
نکته: اغلب الکتروموتورهای سه فاز تولید شده، قابلیت راه اندازی به صورت ستاره – مثلت را دارند. استفاده صحیح این قابلیت، به دانستن دو موضوع زیر بستگی دارد:
- منحنی گشتاور راه اندازی پمپ و موتور، و تأثیر راه اندازی ستاره – مثلث بر این منحنی هنگامی که دور الکتروموتور از صفر تا مقدار نامی افزایش می یابد .(هنگام راه اندازی)، در هر دور، باید گشتاور تولیدی توسط موتور از گشتاور مورد نیاز پمپ بیشتر باشد. تنها در دور نامی، گشتاور پمپ و موتور مساوی می شود.
- ولتاژ کاری الکتروموتور و شبکه. روی پلاک الکتروموتور، اطلاعات مهمی در خصوص ولتاژ و آمپر الکتروموتور درج می گردد. در جدول ۵ به چند نمونه از آنها اشاره شده است.
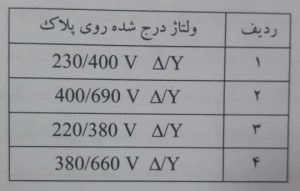
بر اساس جدول ۵، ولتاژ الکتروموتور، در حالت اتصال ستاره – مثلث گزارش می گردد ؛ مثلا در ردیف اول، ولتاژ ۲۳۰ ولت برای راه اندازی مثلث و ۴۰۰ ولت برای راه اندازی ستاره گزارش شده است. این بدین معنی است که این موتور، در کشور ایران که ولتاژ شبکه سه فاز ۴۰۰ ولت می باشد، امکان راه اندازی فقط به صورت اتصال ستاره را دارد؛ زیرا در اتصال مثلث، ولتاژ هر خط باید ۲۳۰ ولت باشد. در حالی که ولتاژ شبکه ۴۰۰ ولت است. بنابر این راه اندازی این موتور با ولتاژ شبکه ۴۰۰ ولت، فقط به صورت تک ضرب ستاره) امکان پذیر می باشد. در واقع این موتور، به گونه ای طراحی شده که اختلاف پتانسیل هر خط (ولتاژ هر خط) در اتصال مثلث ۲۴۰ ولت باشد (در کشورهای اروپایی و امریکایی با فرکانس برق ۶۰ هرتز و ولتاژ برق ۱۱۰ ولت، چنین موتورهایی متداول بوده و امکان راه اندازی به صورت ستاره – مثلث را دارند؛ بنابراین برای کار کرد دائم با برق ۴۰۰ ولت، باید فقط به صورت اتصال ستاره راه اندازی شود. به این موتورها، موتورهای تک ضربه گفته می شود. در اتصال ستاره مثلث و هنگام تغییر اتصال از ستاره به مثلث، موتور دچار شوک لحظه ای می گردد؛ زیرا هم ولتاژ و هم آمپر، در آن، تغییر ناگهانی می کند. این موضوع، باعث تغییر ناگهانی در گشتاور الکتروموتور، و در نتیجه شوک مکانیکی موتور می شود. به الکتروموتورهایی که به صورت ستاره – مثلث راه اندازی می شوند، موتورهای ادو ضربه می گویند؛ یعنی الکتروموتور با دو ضربه به دور و گشتاور نامی می رسد.
در ردیف دوم جدول ۵، ولتاژ الکتروموتور در حالت مثلث ۴۰۰، و در حالت اتصال ستاره ۶۹۰ ولت می باشد. در صورتی که ولتاژ شبکه ۴۰۰ ولت باشد، امکان راه اندازی این موتور به صورت ستاره – مثلث وجود دارد.
اکنون این سؤالات مطرح می شود: با ولتاژ برق شبکه ۴۰۰ ولت و بدون اینکه بخواهیم موتور را به صورت ستاره – مثلث راه اندازی کنیم، تفاوت موتورهای ردیف اول و دوم در چیست؟ و آیا نسبت به هم مزیتی دارند؟ در پاسخ می توان گفت که معمولا موتورهای ۴۰۰/۲۳۰ ولت نسبت به موتورهای ۴۰۰ / ۶۹۰ ولت، طراحی قوی تری دارند؛ زیرا در صورت ثابت بودن توان نامی موتور، الکتروموتور ردیف اول در اتصال مثلث، باید آمپر بیشتری را جذب نماید، بنابراین از نظر مقاومت عایقی سیم های داخلی و همچنین افزایش دمای ناشی از افزایش آمپر، باید مقاومت بیشتری داشته باشد؛ پس در هنگام طراحی، ضرایب ایمنی برای چنین موتورهایی بالا بوده و هنگامی که با ولتاژ ۴۰۰ ولت کار می کنند، کارکرد آنها نرم تر و طول عمر آنها بیشتر از موتورهای ۶۹۰/ ۴۰۰ ولت می باشد.
ردیف سوم و چهارم در جدول ۵ نیز مانند ردیف های اول و دوم است، با این تفاوت که ولتاژ آنها ۵ درصد پایین تر می باشد. مهندسان و تکنسین های مبتدی، گاهی اوقات به این موضوع توجه نمی کنند و اغلب تمایزی بین ولتاز ۳۸۰ و ۴۰۰ ولت قایل نمی شوند. اگر چه هر الکترو موتوری می تواند تا نوسانات ولتاژ ۱۰ درصد را تحمل نماید، اما این بدین معنی نیست که کار کرد دائم موتور، در ولتازی خارج از ولتاژ طراحی آن باشد. در صورت استفاده کردن الکتروموتور ۳۸۰ ولت با ولتاژ شبکه ۴۰۰ ولت، اگرچه شخص ممکن است تصور نماید حادثه خاصی اتفاق نیفتاده است، اما عمر عایق های سیم های داخلی موتور کاهش می یابد. استفاده از الکتروموتور ۴۰۰ ولت نیز با ولتاژ شبکه ۳۸۰ ولت، باعث کاهش عمر موتور و افزایش دمای سیم پیچی آن خواهد شد.
ج) ضریب قدرت
ضریب قدرت در موتورهای سه فاز را Cosɸ می گویند. صرفنظر از مسایل تخصصی برق قدرت، ضریب قدرت، عددی است بین صفر و یک. هر چقدر این عدد به یک نزدیک تر باشد، عملکرد موتور بهتر خواهد بود.
توجه: معمولا ضریب قدرت، عددی بین ۰ / ۷ تا ۰٫۹۵ است. ضرایب قدرت پایین تر از / معمولا قابل قبول نبوده و حتی در بسیاری از کشورها (اداره برق)، جریمه های سنگینی برای استفاده از دستگاه های الکتریکی با ضریب قدرت پایین در نظر می گیرند.
د) درجه حفاظت (IP)
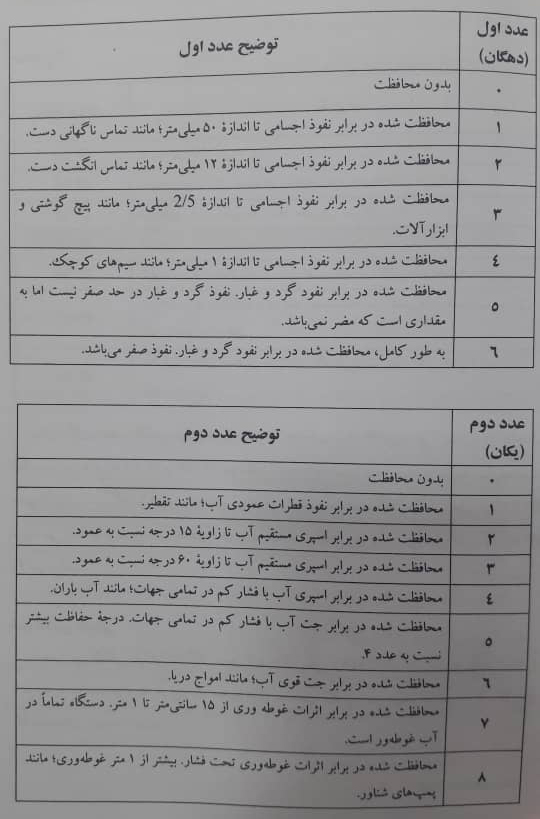
درجه حفاظت پا IP یکی از مهم ترین پارامترهای موتورهای الکتریکی است، که از دو عدد تشکیل شده است (مثلا ۵۴ IP و مانند آن؛) عدد اول (عدد ۵ در ۵۴ IP) بیانگر درجه محافظت الکترو موتور در برابر نفود گرد و غبار به داخل آن، و عدد دوم (عدد ۴) بیانگر درجه محافظت الکتروموتور در برابر نفود آب به داخل آن می باشد. درجه حفاظت، مخصوص الکتروموتور ثبوده و برای تمامی تجهیزات برقی و الکترونیکی کاربرد دارد
در جدول۶ اعداد اول و دوم درجه حفاظت تعریف شده است.
اغلب در پمپ ها و تجهیزات مربوط به آن، از درجه حفاظت های جدول ۷ استفاده می شود.
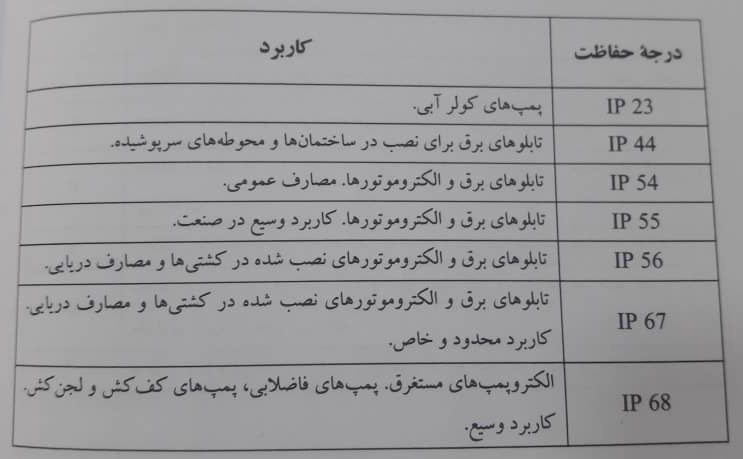
سازندگان، اغلب الکتروموتورها را با درجه حفاظت ۵۵ IP تولید می کنند، و از ساخت الکتروموتورهای با ۶۷ IP و ۶۸ IP صرفنظر کرده یا به صورت محدود تولید می نمایند. معمولا تولید کنندگان الکتروپمپ های مستغرق، با خود مستقیمه الکتروموتورهایی با ۶۸ IP تولید می کنند یا با تمهیدات خاصی، درجه حفاظت الکتروموتورهای ۵۵ IP را تا ۶۸ P بالا می برند.
هـ) کلاس عایقی
انجمن بین المللی تولید کنندگان تجهیزات الکتریکی (NEMA)، عایق بندی موتورها را با توجه به درجه حرارت موتور در محیط های مختلف کاری، در چهار کلاس , A , B , F H طبقه بندی نموده است:
توجه: موتورها اغلب در کلاس F و به ندرت در کلاس A کار می کنند. موتورها قبل از شروع به کار، تحت تاثیر دمای محیط اطراف خود قرار دارند که اصطلاحا آنرا دمای محیط Temperature Ambient می گویند.
در NEMA، برای تمام کلاس های عایق بندی، دمای ابتدایی ۴۰ درجه سانتی گراد با یک رنج حرارتی به صورت زیر، استاندارد شده است:

وقتی موتور استارت می خورد، دما افزایش می یابد؛ و هر کلاسی، یک دمای مجاز مشخص دارد، ترکیبی از دمای محیط و دمای مجاز معادل ماکزیمم، دمای سیم پیچ ها خواهد بود؛ به عنوان مثال، در کلاس ۴، با فاکتور سرویس ۱، دما می تواند به اندازه ۱۰۵ درجه می تواند افزایش یابد . بنابراین داریم:

نکته: با یک بازه مجاز حرارتی ( مثلا” ۱۰ درجه) گرم ترین نقطه در مرکز سیم پیچ را هات اسپرت (Hot Sport) می نامند.
در کلاس F، این بازه ۱۰ درجه است؛ بنابراین مرکز سیم پیچ دارای بیشترین دمای مجاز ۱۵۵ درجه خواهد بود. دمای کاری موتور در کارآیی و طول عمر کاری موتور بسیار مهم است، تا جایی که ۱۰ درجه افزایش دما از بالاترین حد مجاز، باعث کاهش عمر عایق بندی موتور به اندازه %۵۰ می شود.
و) بازده
در دسامبر ۱۹۹۷ در نشستی که با حضور ۵۵ کشور دنیا در کیوتو ژاپن برگزار شد، نمایندگان این کشورها پذیرفتند تا اقدامات لازم برای کاهش انتشار آلودگی های زیست محیطی را اجرا کنند. ۳۸ کشور صنعتی، توافق کردند که بین سالهای ۲۰۱۲-۲۰۰۸، تا متوسط ۵ انتشار آلودگی را کاهش دهند. علاوه بر این، اتحادیه اروپا نیز برای کاهش ۸ درصدی انتشار آلودگی، کمیته ای ویژه تشکیل داد.
در اکتبر ۱۹۹۸ اتحادیه اروپا و CEMEP (کمیته سازندگان ماشین های الکتریکی و الکترونیکی) توافق کردند که سه کلاس راندمان برای موتورهای الکتریکی تعریف شود. این توافق، کمک می کرد تا راندمان موتورهای الکتریکی بهبود یافته و همزمان، انتشار گاز دی اکسید کربن کاهش یابد. با این توافق، موتورهای با راندمان EFF3 ( پایین ترین کلاس راندمان کاهش قابل ملاحظه ای در بازار پیدا کرد.
استفاده از سوخت های فسیلی برای تولید الکتریسیته، منبع عمده انتشار گازهای گلخانه ای است، که به همین خاطر، صنایع نقش عمده ای در کاهش انتشار زیان بار این گازها خواهند داشت. با افزایش راندمان، فرایندهای تولید و نصب تجهیزات با راندمان بالا، صنایع برق کمتری مصرف خواهند کرد و به دنبال آن نیز برق کمتری تولید خواهد شد. موتورها در حدود ۶۵% انرژی مصرفی در صنایع را به خود اختصاص می دهند. موتورهای با راندمان بالا می توانند نقش عمده ای را در کاهش انتشار دی اکسید کرین ایفا نمایند.