عموما در پمپ ها، از دو محرکه استفاده می شود:
- موتورهای الکتریکی آسنکرون با ولتاژ متناوب (AC)، سه فاز یا تک فاز.
- موتورهای احتراق داخلی بنزینی یا گازوییلی (دیزل موتور).
ناگفته نماند که در بعضی کاربردهای خاص و در مواقعی که دسترسی به بخار داغ فراهم باشد، از توربین های بخار نیز استفاده خواهد شد.
- موتورهای الکتریکی
با گسترش نیروگاه ها و توسعه شبکه های برق در سراسر دنیا، امروزه کاربرد موتورهای الکتریکی در پمپ ها به طور وسیعی افزایش یافته است. تقریبا به جز کاربردهای بسیار خاص، تمام موتورهای الکتریکی مورد استفاده در پمپ ها، از نوع آسنکرون با روتور قفس سنجابی و مولد برق متناوب AC می باشد.
مهندسین و تکنسین های پمپ، باید اطلاعات نسبتا جامعی از موتورهای الکتریکی داشته باشد که در این کتاب نیز، در بخش پمپ ها و به تفصیل درباره موتورهای الکتریکی شرح داده شده است.
موتورهای آسنکرون قفس سنجابی با مولد برق متناوب (AC)
این موتورها عموما تا توان ۲٫۲ کیلو وات (۳ اسب بخار)، به صورت تک فاز و سه فاز، و از این توان به بالا، فقط به صورت سه فاز تولید می شوند. توان های استاندارد این موتورها تا توان ۲۰۰ کیلو وات) که عموما توسط سازندگان آن تولید می شود، به شرح جدول ۲ می باشد.
دور چرخش موتورهای آسنکرون، ثابت بوده و با افزایش یا کاهش بار موتور تغییر نمی کند. از نظر تئوریک، دور این موتورها از رابطه زیر به دست می آید:
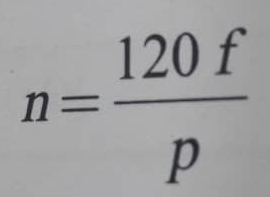
در این رابطه:
f: فرکانس برق (Hz 50 یا Hz 60)، و
p: تعداد قطب های الکتروموتور که همیشه عددی زوج می باشد. بنابراین الکتروموتور ۲ قطبی، از نظر تئوریک، دور ۳۰۰۰ دور بر دقیقه خواهد داشت.
بنابراین الکتروموتور ۲ قطبی، از نظر تئوریک، دور ۳۰۰۰ دوردردقیقه خواهد داشت.

جدول ۳، دورهای استاندارد (سرعت سنکرون) این موتورها را برای فرکانس ۵۰ هرتز نشان می دهد.
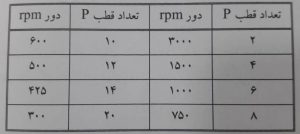
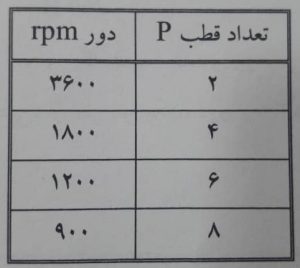
و برای فرکانس ۶۰ هرتز خواهیم داشت.
اما دور الکتروموتورها، همیشه کمتر از مقدار نامی آنها است، که این موضوع، به خاطر ضریب لغزش می باشد. در واقع وجود لغزش در موتورها، باعث میشود که دور الکتروموتور کاهش یافته و به عنوان مثال، دور الکتروموتور به جای ۳۰۰۰ دور بر دقیقه ۲۹۳۵ دور در دقیقه باشد. معمولا در توان های کمتر، لغزش بیشتر، و هر چقدر توان الکتروموتور افزایش یابد، لغزش کمتر و سرعت الکترو موتور به سرعت نامی نزدیک تر می شود. به عنوان پیش فرض می توان ضریب لغزش را بین ۲ تا ۴ درصد در نظر گرفت؛ و به همین دلیل است که گاهی اوقات، دور نامی الکتروموتوها را به جای ۳۰۰۰ دور بر دقیقه ۲۹۰۰ دور در دقیقه ثبت می کنند.
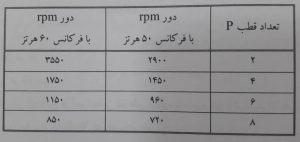
جدول ۴، دورهای متداول الکترو موتورها را با در نظر گرفتن ضریب لغزش ۲ تا ۴ درصد نشان می دهد. در واقع گاهی اوقات، دور الکتروموتورها به صورت این جدول گزارش می شود.
میزان دقیق لغزش در موتورها، توسط سازنده گزارش شده و مقدار دقیق دور الکتروموتور، روی پلاک آن درج می گردد. باید توجه داشت که منحنی های عملکرد گزارش شده توسط سازندگان پمپ، در کاتالوگ ها معمولا با استفاده از محرکه های الکتریکی خاص و با استفاده از مبدل های کنترل دور آزمایش شده اند؛ یعنی دقیقا هنگام آزمایش دور الکترو موتور ۲۹۰۰ دور بر دقیقه تنظیم شده و مشخصه های هیدرولیکی پمپ به دست آمده است، اما در واقعیت، ممکن است دور الکتروموتور به جای ۲۹۰۰ دور بر دقیقه، ۲۹۲۰ دور بر دقیقه و با ۲۸۸۰ دور بر دقیقه باشد. این موضوع، بر عملکرد هیدرولیکی پمپ، تأثیر خواهد داشت. البته همانطور که در فصل قوانین تشابه توضیح داده خواهد شد، تأثیر این موضوع بر عملکرد هیدرولیکی پمپ، در بسیاری از مواقع ناچیز و در حد کم می باشد.